Vectors
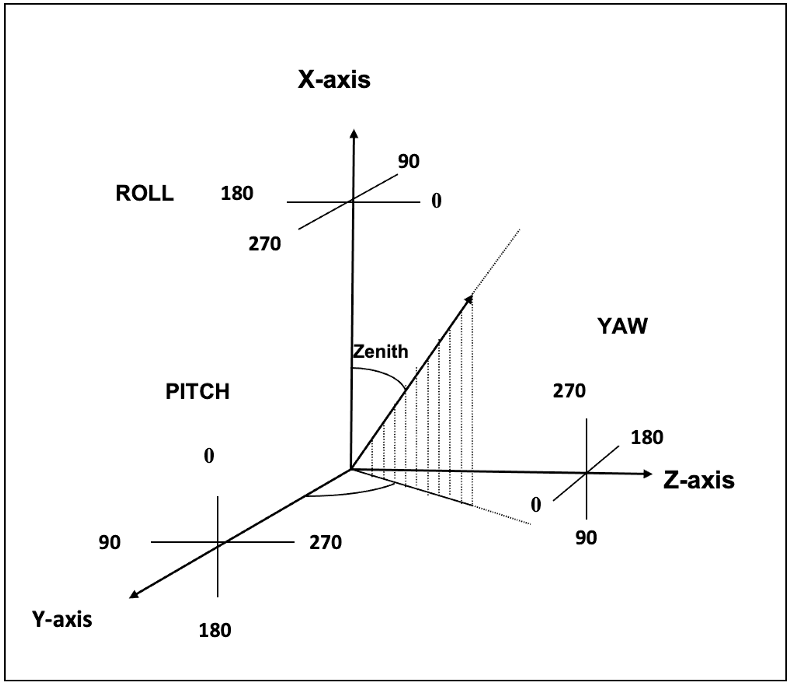
Analysis conventions — roll, pitch, yaw, zenith
- Zenith — direct angle between the vector and +X, range 0–180 deg.
- Roll — CCW angle about +X, measured from +Z to the vector's projection in the YZ plane.
- Pitch — CCW angle about +Y, measured from +X to the vector's projection in the ZX plane.
- Yaw — CCW angle about +Z, measured from +Y to the vector's projection in the XY plane.
Subject / primary theodolites & reference readings
Subject theodolite is the instrument reading the target (a mirror cube face, an optical flat, etc.). Primary theodolite is the reference instrument that defines the azimuth origin for the session.
When subject = primary (one instrument, or two that share an azimuth reference), leave Subj az ref and Prim az ref blank. The pipeline uses the subject's azimuth as-is.
Az / El sec samples: type every arcsec reading you took (space or comma separated). The mean is used for the reduction; σ drives pass/fail vs. your tolerance.
| Name | Dir | Subj # | Prim # | Subject azimuth | Subject elevation | Subj az ref | Prim az ref | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| deg | min | arcsec samples | deg | min | arcsec samples | deg | min | sec | deg | min | arcsec samples | |||||